日本語
中文
首页
关于我们
公司概况
公司沿革
经营业务
资源再利用设备的进口与销售
破碎机
金属分选机
X射线分选机
非铁金属分选机
永磁分离器
多光谱色选机
热交换设备的制造与销售
零部件·设备采购与销售
现场自动化优化与改造
日中贸易进出口
食品相关进出口
日本技术的海外引进
生产基地
设备制造相关地址
海鲜加工生产地址
资讯中心
内部/外部新闻
通知公告
联系我们
自动点胶机(ASAHI-X) - 「详情」
业务种类
资源再利用设备的进口与销售
破碎机
金属分选机
X射线分选机
非铁金属分选机
永磁分离器
多光谱色选机
热交换设备的制造与销售
零部件·设备采购与销售
现场自动化优化与改造
日中贸易进出口
食品相关进出口
日本技术的海外引进
业务种类
资源再利用设备的进口与销售
破碎机
金属分选机
X射线分选机
非铁金属分选机
永磁分离器
多光谱色选机
热交换设备的制造与销售
零部件·设备采购与销售
现场自动化优化与改造
日中贸易进出口
食品相关进出口
日本技术的海外引进
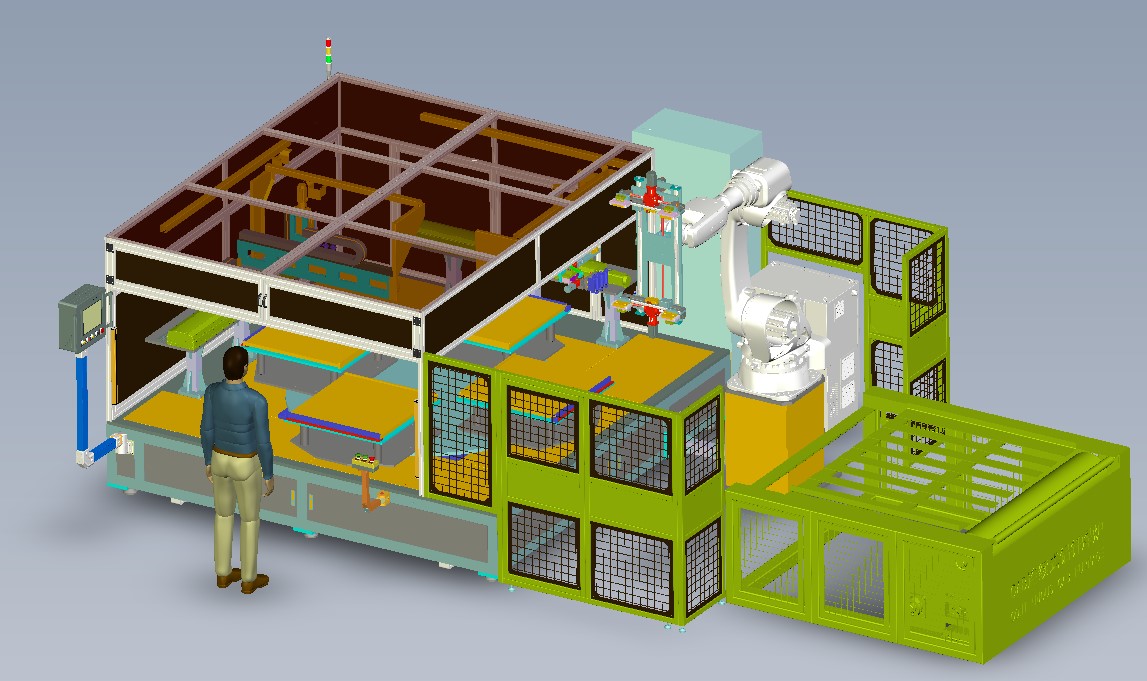
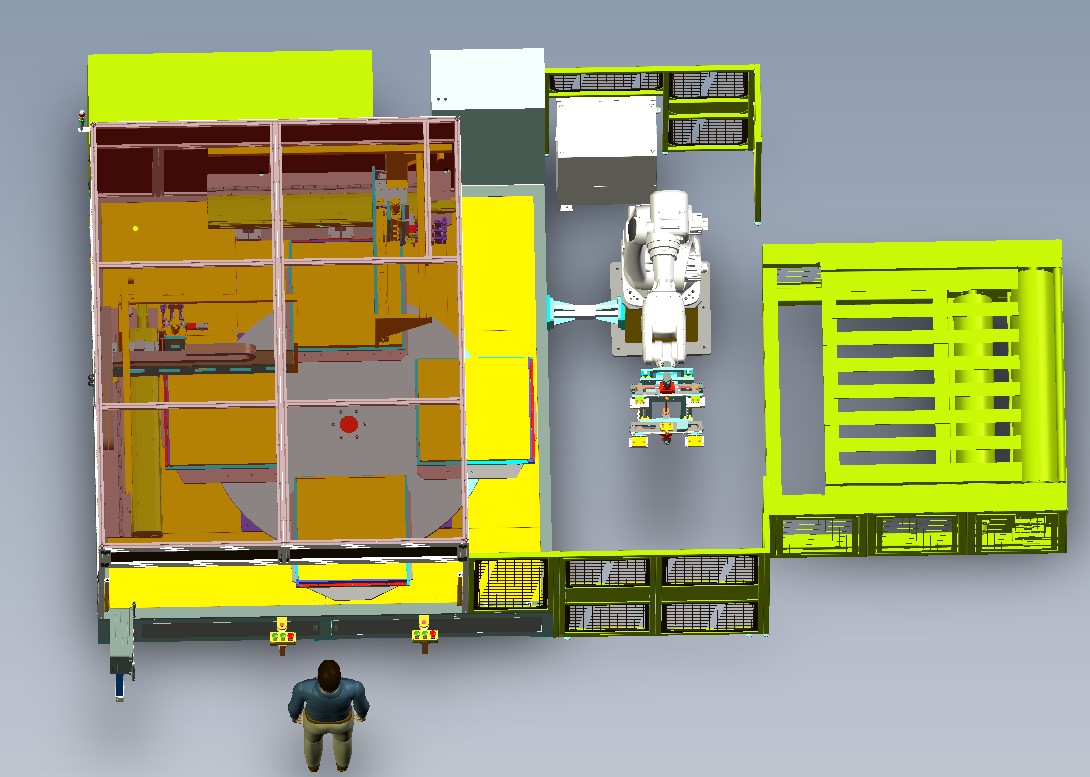
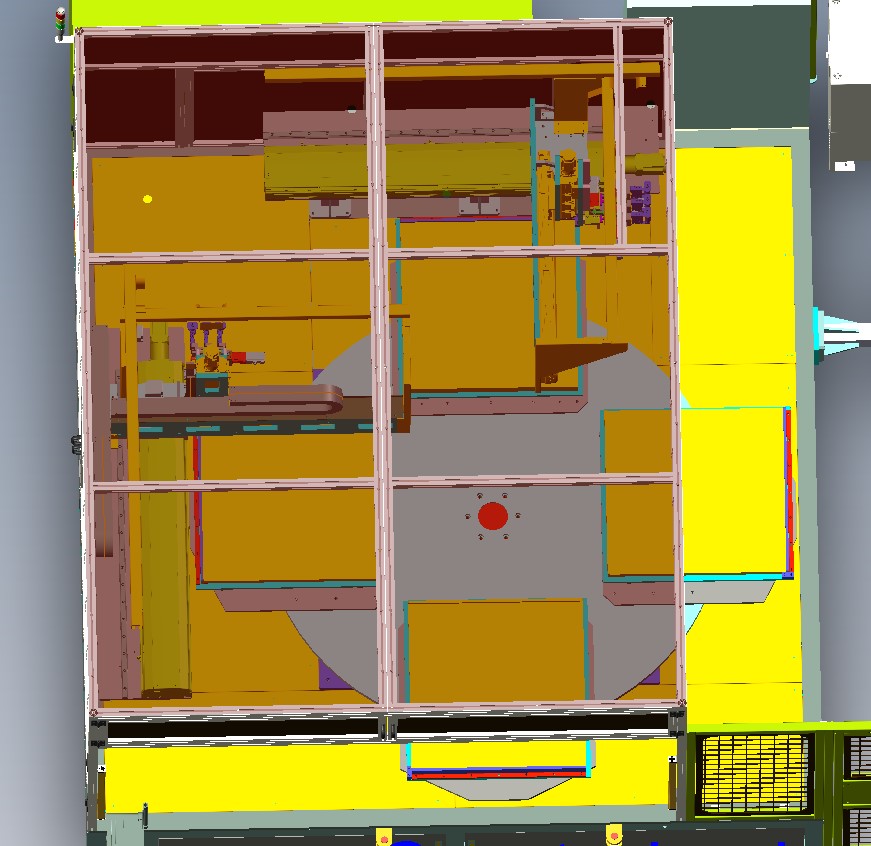
图例展示
工作原理
人工上线后旋转至下一工位,使用三头针进行正面喷涂后再流转至下一空位进行侧边喷涂。待喷完后由机器人进行自动夹取放置钎焊炉。
整体流程可实现25s完成一个芯体作业。
技术特点
采用4轴伺服模组(X, Y, Z, R) 完成喷涂动作喷涂路径可在程序自定义;
Z轴和R轴使用带刹车伺服,即使紧急停止或意外断电也可锁住,避免喷涂针和芯体碰撞;
使用进口定制阀,并搭载needle喷头:设有喷涂针直立检查装置和防堵装置;
返 回
 日本語
日本語 中文
中文